Roshan Dhakal
I am a Ph.D. candidate in Computer Science at George Mason University and a member of the Robotic Anticipatory Intelligence & Learning (RAIL) Lab, advised by Dr. Greg Stein. My research sits at the intersection of robotics, machine learning, and task and motion planning, with a focus on anticipatory decision-making for household and service robots.
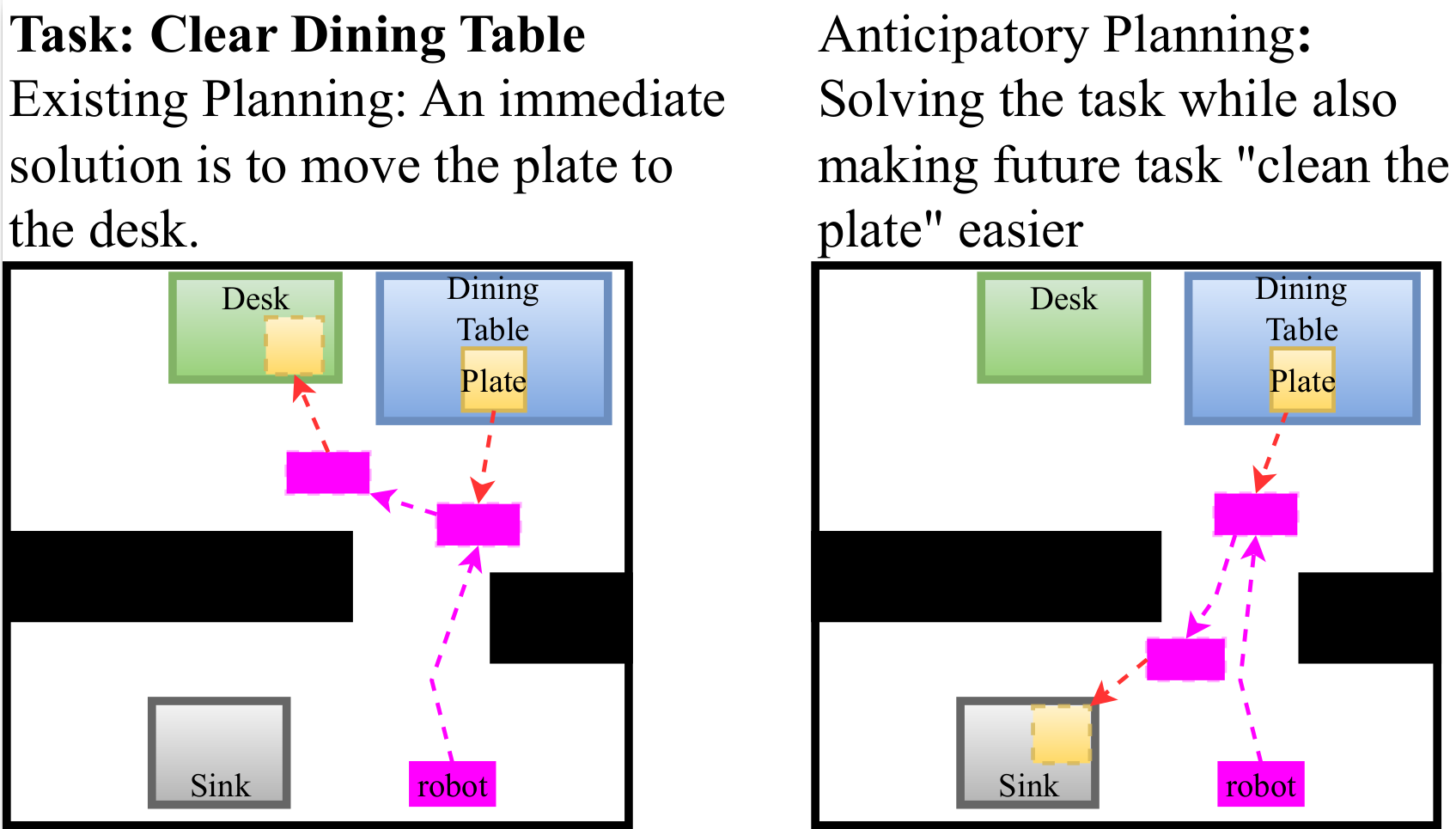
More broadly, my research focuses on enabling robots to reason about the consequences of their actions and guiding them toward forward-thinking behaviors such as organization, tidiness, and preparation. This opens exciting opportunities to develop robots capable of serving as long-term assistive companions.
Or if you're interested in a famous Nepali board game (multiplayer or play against AI opponent), I built बाघचाल (Bagh Chal) — click here to play!